
El objetivo principal del Proyecto de Programación de Robots es permitir al estudiante poner en práctica los conocimientos adquiridos a través de las clases teóricas sobre programación de robots, así como desarrollar sus habilidades de programación de robots a través de un software muy conocido en la industria.
Los alumnos han trabajado en pequeños grupos y entre ellos, han elegido la aplicación desarrollada que se aplica mejor al robot real disponible en el laboratorio. Posterior a ello, los estudiantes han adaptado esta aplicación a la plataforma experimental durante el curso con sesiones en el laboratorio y utilizando el material disponible.
Finalmente, cada grupo ha realizado una presentación oral de su solicitud conjunta explicando claramente el funcionamiento especificaciones de su aplicación robótica con una demostración y han competido con los diferentes grupos de clase, de tal forma que el grupo que presente la aplicación robótica más votada ha logrado una gratificación en la nota final.
Este proyecto sobre programación de robots implica la programación de robots ABB para una aplicación de nuestra elección utilizando la aplicación RobotStudio. Los participantes que han resultado ganadores han sido David Moreda Amezcua, Daniel Roldán Bascón, Ana Vera Guerrero y Elena Pérez Baena.


En esta parte conjunta, el grupo ha elegido una implementación de una aplicación de dibujo para ABB. Robot IRB 120 equipado con un controlador IRC5 con la versión 6.11.01. Para implementar esta aplicación, han creado una nueva herramienta para el robot capaz de agarrar cuatro bolígrafos, cada uno de ellos distinguido por diferentes colores. El lienzo designado para el robot consiste en una caja de cartón con una hoja A3 adherida al lado vertical de la caja.
Dentro de este entorno, las figuras elegidas ha sido una estrella de cinco puntas, una estrella de seis puntas, un copo de nieve, un cofre del tesoro, el escudo del Betis y un barco. Cada figura ha sido configurado para dibujarse en cualquiera de los cuatro colores. El programa una vez iniciado, permite al usuario seleccionar primero el color deseado y posteriormente elegir la figura que desean que dibuje el robot. Después de esta selección, el robot comienza a moverse, traduciendo las elecciones del usuario en un dibujo en el lienzo. A su vez, el programa permite calibrar los planos de color, es decir, se mueve hasta los límites establecidos para cada plano.
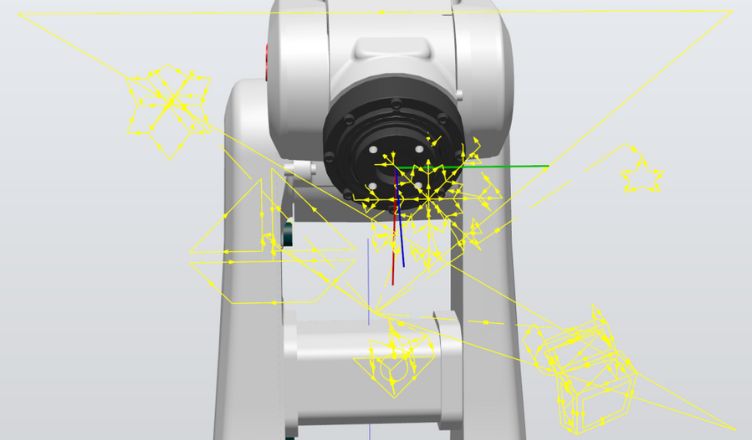
Podemos observar los dibujos diseñados por los alumnos
Los alumnos han encontrado algunos desafíos; la caja de cartón no es completamente vertical y, además, el marco de coordenadas del robot está inclinado. Además, para garantizar que se eviten encuentros cualquier punto de singularidad, necesitábamos determinar los límites de dibujo permitidos para cada pluma en nuestro lienzo. Conociendo esos límites, podrían operar dentro de estos estando definidos para crear las figuras seleccionadas. Sin embargo, el mayor desafío ha sido identificar los puntos de dibujo para generar las trayectorias.
Todo el equipo ha estado implicado al 100%, diversificando las tareas y trabajando por el bien del propio proyecto para el equipo. Los alumnos están muy contentos con los resultados obtenidos, ya que el robot ha sido capaz de ejecutar todos los diseños.
Esta es una de las últimas asignaturas que abordan, ya que pertece a cuarto curso, siendo el culmen de su trabajo en robótica y que necesitarán en el desempeño de su trabajo futuro, creando nuevos programas y aplicaciones. Esta creación que dibuja en diversas trayectorias no es limitante, porque se puede aplicar a cualquier aplicación robótica y puede ser extensible a otra aplicación industrial o robótica.



